回忆下面这个场景 —— 您可能在贸易展览或视频上经常看到这一场景:机械手臂从其静止位置有目的地移动,将物体(如球体)抓起至空中,替换物体,然后恢复静止状态。每个动作都很快速、流畅,且由机器完成。
现在您可想象另一个场景。1937 年,在伦敦一家没有灯光的剧院,年轻的 Laurence Olivier(传奇的职业生涯还在等着他)犹犹豫豫、不情愿地(就像被下咒一样)从另一位演员手中接过一个头骨。
“唉,可怜的 Yorick!我认识 Horatio …”
一个场景涉及动作,另一个则涉及手势(图 1)。本文探讨了这两者的差异,及这一差异给电机控制架构带来的巨大变化。

动作与手势
如今,这两个词语的使用有着严格的区分。它们都描述一种基于一系列连续位置和时间的轨迹。动作轨迹仅取决于其端点和受控制设备的物理特征 —— 自由度和动力:机械手臂、无一人机、自动驾驶汽车等。当机器人在重复一个动作时,它会精准重复相应的轨迹。
但手势轨迹可能受限于外部因素。例如,为避免损坏有效负载,如一整杯热咖啡,可通过选择适当轨迹将加速度保持在某固定值以下。或者优化轨迹,以最大限度减小某个参数,如能耗或噪音。如果要避免障碍物,可能需选择较复杂的轨迹,
涉及多个要素。传统的机器人学会假设需操控的物体和其所在环境的其他物体都是静止的。但是,现在许多系统至少由机器视觉部分控制。摄像头输入为物体识别模块提供信息,以确定预期目标及附近其他物体的位置、方向和轨迹,让机器人空出时间在需要更高效率的环境处理任务。
协作机器人正变得日益重要。多个协作机器人、甚至协作机器人与人类需配合完成同一动作。在这种协作中,相互之间的交互可能并不多,例如在稍微重合的装配线工位上。这种交互也可能非常密切,如机器人手术助手。不管是哪种情况,协作都会带来新的设计问题。在机器人领域,实施复杂、不可预测的动作可能面临难以突破的障碍。如果需人类参与,则存在功能安全问题,设计师需证明操作过程不会造成人身伤害。
在人类参与时还有一个复杂性问题,协作机器人的研究可能未充分探究这一问题。人会有意识或无意识地对手势赋予某种含义。机械手臂能以“我是机器,没意识到你”的“心态”实施机械动作。尝试在镜子前面模仿机械手臂,看看机械动作意味着什么。但是,当机械设备使用任务要求未明确规定的轨迹实施手势时,我们的大脑会推理出某种意义、甚至某种情绪,如令人毛骨悚然、令人发笑或令人分心并导致危险。我们还可将这一特征用于向人类传输机器的信息。
这种理论非常有趣。但这对系统设计师意味着什么?机器活动正从简单的动作演变为手势。在这一过程中,传感器和电机绕组之间的软硬件必须随之变化。根据系统的分区情况,尤其在物联网 (IoT) 实施中,距离绕组最近的电机控制块可能变得大为不同。
手势管线
我们可将生成手势的过程描述为管线,包括从高度抽象(情景和目标)到高度具体(电机绕组电流和轴角编码器)的阶段(图 2)。这一定义有其意义,但有点武断。
.
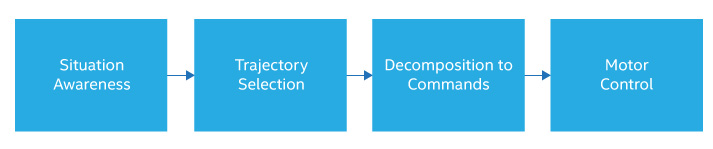
第一个阶段是情景感知。在该阶段,人工智能或人类需保持环境的动态 3D 模型。该阶段最好应该评估可移动物体的意图,以确定物体实施相关动作的可能性,以及是否需要控制该物体?会受到什么限制?相关手势应该向观察者传达什么信息(若有)?
下一个阶段是利用感知阶段的数据选择完成相关目标的轨迹。例如,自动驾驶汽车选择合适的路线和速度驶往 B 点,同时避免碰撞、激怒其他司机、违反交通法规或吓到行人。再如,一个协作机器人尝试通过人工协助抓取某个部件。此时,轨迹可能面临一些额外限制,如最大限度减少能耗、确保加速度低于限值或描述空间内的特定对象。
在第三个阶段,系统必须将轨迹按时间映射至一系列由电机控制器执行的命令。该操作可在不同的抽象层级进行,从将轨迹分解为无数个点到将其建模为一系列复杂流畅的弧线。
最后,使用电机控制器。该阶段必须根据前一阶段的结果开展工作,确保电机绕组上的电流支持设备遵循相应轨迹。一般而言,它是一个反馈控制系统。
放大
对于任何一个阶段,我们都可写出一本专著。不过,我们将重点讨论一下对于最后两个阶段的一些评论。它们非常有趣,紧密关联,受物联网的影响最大。
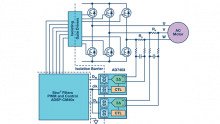
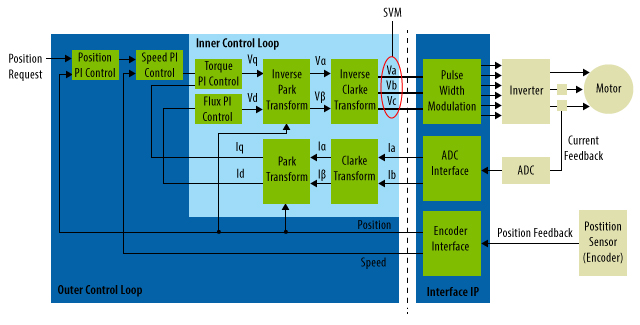
毋庸置疑,该管线的最后要点是动作。这涉及到电机绕组的电流,从而影响电机控制器收到的信号:磁场定向控制器的扭矩水平、同步电机的脉冲序列等。如何使轨迹 —— 可能由几英里外的数据中心所创建 —— 在输入电机控制器时保持正确形式?
简单的机械动作不存在这一问题。根据每个设备的自由度,轨迹可定义为一个端点。电机控制器中的软件可实施经典的比例-积分-微分 (PID) 控制器循环(图 3),它可逐步加速至最大值以到达下一个端点的附近位置,然后减速并停在该端点上。
但是,如何处理更复杂的轨迹?只要该路径比较重要且该路径上的速度无关紧要,您可以将其分为较小的线性部分,然后实施上述步骤。PID 控制器会全力跟踪这一分段线性波形。根据闭环传递函数和更新速率,该方法可使结果接近或不接近轨迹;或者,如果控制循环非常快,在端点重现了突然变化,该方法就可产生噪音和耗能较大的动作。
如果生成轨迹的程序和电机控制器之间的带宽有限,或延迟无法预测,该方法会产生问题。它还面临着一个固有局限性:控制器只知道下一个端点,不能实施可用于轨迹的优化。所有优化只有在规划好后才可用于轨迹。理想的情况是,本地控制器能够进行预测和优化,而不是仅实施简单的 PID 控制。
这种情况会导致电机控制器的计算负载显著增加。动作控制专业公司 Trinamic 首席执行官 Michael Randt 指出,独立的微控制器单元 (MCU) 需要处理磁场定向控制及其矩阵算法方面的过多任务。然而,使用混合信号 ASIC 或 FPGA 可获得扩展空间,从而处理要求更严苛的任务。
Digi-Key 应用工程副总裁 Randall Restle 在 2016 年英特尔® 信息技术峰会的一篇文章中介绍了一种预见性优化方法。该方法需要从当前位置开始提取轨迹的一系列点和速率。将已知最佳曲线的一部分与相关点搭配。然后根据当前值选择曲线的相应速率和加速度。这样,控制器始终可采纳轨迹上的局部最佳路径。
该流程需要大量计算资源。但 Restle 的文章也指出,前人已经付出了巨大努力:很久以前(数字化有如天方夜谭),机械凸轮设计师便使用五阶多项式创建一系列最佳的凸轮形状。这些形状可进行参数化,使用表格表示,并用于匹配轨迹上后面的几个点。
根据该方法,您可进行概括。通过在状态空间工作,您可捕捉位置和速率信息,并通过数学方式最大限度减小该空间上某路径的成本函数,以近乎理想的方式控制动作。这种持续优化会造成巨大的计算负担,但限于 ASIC 或 FPGA 加速器范围内。
英特尔系统解决方案工程经理 Ben Jeppersen 表示,可进一步实施模型预测性控制 (MPC)。MPC 技术涉及用于无传感器控制永磁同步电机的卡尔曼滤波器,可保持整个系统的数学模型,可能仅包括受控制的设备,或控制至环境。使用该模型,该控制系统可测试轨迹上下一步操作的所有选项,选择似乎是本地最佳的选项。再次强调,计算负载非常大。MPC 技术在工业流程控制领域得到广泛使用,但相比工业领域,学术界如今对于这一技术的讨论更为广泛。
所有这些技术旨在将预先选择的轨迹与受控制设备的位置和速率反馈进行组合,以尽量实现对设备电机的最佳控制。通过在状态空间工作或利用 MPC,可针对无法直接测量的变量优化轨迹上的动作,如最大加速度或加速度变化率、避免共振、电机发热或其他物理和可预测量。
通过将控制循环计算转移至强大的本地硬件,相关技术还可用于采用终端计算的物联网场景。轨迹选择可由云或集中控制器实施。如果轨迹被作为多项式分段等因素进行有效通信,连接对于带宽或延迟的要求就不高。近实时交易(例如在传感器和动作控制器之间)可在本地工业网络上处理,如时间敏感性网络。借助足够的本地计算能力,本地摄像头的数据甚至可用于更新外部物体的位置和动作信息,并修改它们的轨迹。
这些技术旨在帮助创建手势,可将电机控制深入推进到应用数学范畴。但 Trimanic 的 Randt 指出,该技术仍属于工程范畴,不属于数学应用。无论是选择控制的对象,还是选择算法或在真实硬件上设计实施方案,您都需要深入了解电机,这是绕不开的。