伺服是目前工业制造领域一种十分常见的技术,我们之前也已经谈的比较多了。可是话说,到底什么是伺服呢?本期,咱就来简单的聊一聊。
伺服 Servo 这个词来自拉丁文 “servus”,意思是仆人按照主人的指示行事,并且忠实而快速地工作。
而 Servo 作为一个技术名词,我比较认同的定义大致是这样的:
a device used to provide control of a desired operation through the use of feedback
通过使用反馈来为所需的运行操作提供控制的设备装置
从上面这段描述中我们可以看到,伺服首先是一种控制装置,需要有指令输入和动力输出。
由于需要对运行动作进行控制,其输出的就应该是机械动力。因此,伺服其实本质上是一种用于运动控制的动力传动技术。如果按照所使用的动力类型的不同,我们基本上可以把伺服分为:气动伺服、液压伺服、直流伺服和变频伺服...等。

不过,由于近些年来变频驱动技术的发展成熟,加上其在很多方面表现出来的极佳的应用体验,如:体积较小、使用灵活、易于集成、方便维护...等等,变频伺服已经在大量应用中取代了其他类型的伺服技术,逐渐成为工业运控领域的绝对主力。这就是为什么现在大家只要提到伺服,基本上指的就都是变频伺服。
伺服的输入为与运行动作需求相对应的一系列动态控制指令,如:速度、位置或转矩...等等。之所以说这些指令是动态的,是因为在实际应用中,目标对象往往需要在运行过程中根据工艺要求不断改变其位置、速度、转矩...等动作状态。因此伺服产品往往需要有一个或多个实时控制信号输入端口,如:脉冲输入、模拟量输入或数字通讯输入...等,用于从上位控制器接收连续的运动控制指令。
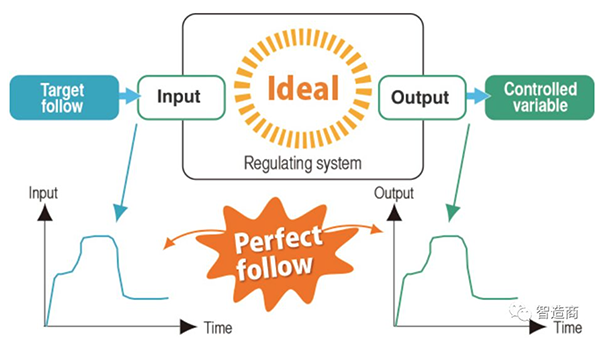
这些指令可能是控制器中已经规划好的运动曲线在各个时间点上的值,也有可能是基于其他运动轴状态实时计算出来的中间变量(如:主轴...),但不管怎样,伺服的任务就是要让其最终控制对象的动作轨迹尽可能的与给定的运行曲线相吻合。
我们需要特别要注意伺服定义中“使用反馈”这几个字。尽管在伺服与普通传动技术(例如:变频)之间并没有一道非常清晰的界限,但在系统中是否有用于实现控制的面对应用对象的反馈机制,却是其区别于一般的气动、液压和电机传动技术的一个关键标志。

伺服的反馈主要是指那些用于检测动力执行机构速度和位置...等动作状态的传感元器件,例如:旋转编码器、直线光栅尺...等等,并且通常这些反馈元件都会被直接整合到伺服产品的控制环回路中,如:大部分伺服电机内部都集成了反馈编码器、以及通常伺服驱动器也都会将反馈接口卡作为其产品的一项标准配置。

伺服系统需要借助这些反馈元件即时获取控制对象的位置、速度...等运动状态,并将其与输入端给定的目标值进行实时比对,然后依据反馈误差的大小快速调节其动力响应输出,从而让系统的运控性能更加接近其工艺所需要达到的应用指标。

而对于伺服而言,我们在这里所说的“快速响应”,通常指的是毫秒甚至微秒级的,这样系统才能够在极短的时间窗口内对那些细微的动作偏差作出反应并及时调节。因此,绝大多数伺服产品都会用频响带宽值(BandWidth)来标称其响应能力。而我们看到在印刷套色、金属加工、数控机床、木料加工、纸张处理......等各类高性能运控应用中都会使用伺服技术来实现精确的位置控制,就是伺服响应能力的一种体现。

不过,伺服的这种实时响应能力不仅仅适用于高精度的位置控制,很多有着较高动态特性要求的应用领域,如:机器人、风电变桨、贴标套标、包装码垛、阀门控制...等,也都会用到伺服技术。在这些应用中,真正的挑战往往并不一定是定位精度(一般毫米级就都足够了),而是如何在高速运行过程中,克服来自负载、环境和自身...等多方面的各种扰动,并确保动作的姿态和节拍达到设备运行的工艺要求。

此外,在很多非位置控制领域中,我们也能够看到不少伺服技术的应用,这同样是因为其较强的闭环响应能力。例如:一些设备在薄膜材料(如:纸张、塑料、电池...等)的张力控制上,就用到了伺服系统在速度、转矩方面具备的高动态响应和快速调节的特性;再比如:现在很多空压机和液压泵站也已经开始在使用伺服技术,以实现对气体和油路压力的灵活控制...

伺服技术在工业领域的应用,其商业驱动力源于制造企业在追求生产效益时,对产品质量和设备自动化流程提出的越来越高的要求;而其能够在最近二十几年间从航空航天、数控机床、半导体、机器人...等少数专业领域逐步普及到各类通用自动化行业,则很大程度上得益于因技术成熟和产品易用性的提升而带来的系统综合成本的优化,尤其是我们之前提到的变频驱动技术的发展,在其中起到了极为积极的作用。
本文来源:伺服是什么?





