来源:德州仪器
制造业和服务行业对更高自动化水平的需求不断增长,推动了人形机器人的开发。人形机器人变得更加复杂和精确,自由度 (DOF) 变得更高,并且对周围环境的响应时间(按毫秒计)缩短,从而能更好地模仿人类的动作。图 1 展示了人形机器人的典型电机和运动功能。

图 1:显示人形机器人 DOF 变得更高的位置
具有更高的 DOF 意味着人形机器人需要更多的电机驱动器。机器人设计中的驱动器位置决定了不同的驱动器要求。部分关键规格是:
· 通信接口架构
· 位置感测
· 电机类型
· 电机控制算法
· 功率级要求
· 电子电路尺寸
· 功能安全注意事项
目前,虽然针对协作机器人和工业机器人制定了相关标准,但没有规定人形机器人功能安全要求的标准。随着需求的持续增长,预计标准机构将来会为人形机器人规定安全要求。在规定安全要求之前,人形机器人设计人员必须对当前系统设计进行相应调查,从而在将来尽可能减少因重新设计所带来的工作。ISO 13482、ISO 10218 和 ISO 3691-4 可以阐明未来的预期。
由于人形机器人用电池供电,因此电机驱动器旨在更大限度地提高效率,从而延长机器人的工作时间范围。
当使用高功率级别时,人形机器人可以集成 PMSM 之类的电机。有刷直流电机可用于一些低功耗情况,例如手部控制和手指控制。但是,当前的设计趋势表明,所有电机未来都将是无刷式电机。
PMSM 电机有两种绕组选择:梯形绕组或正弦绕组。对绕组和控制算法的选择会影响电机控制的精确度。
电机设计的另一个关键要素是更快地切换 FET,这样就可以使用能提高电机单位重量扭矩的新设计选项。
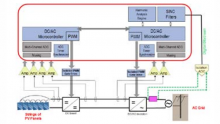
选择电机类型后,用户可以确定控制电机的方法。实现控制回路有多种备选方法,但电机控制通常与图 4 中所示类似,其中显示了所需的模拟子系统和处理器外设。

图 4:机器人控制的实时通信时序需求
使用图 4 作为通用模板,表 1 列出了在选择算法 FOC 或阻塞换向时所需的外设和性能。

表 1:电机控制类型的外设和电路需求
TI 具有许多不同的 MCU,可满足算法和角度传感器的要求。重要的因素包括 IC 的大小和实现高性能驱动系统的实时能力。在电机控制算法中使用了 C2000 实时微控制器和基于 ARM 的微控制器。
免责声明:本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将立即删除内容!本文内容为原作者观点,并不代表本站赞同其观点和对其真实性负责。