如何有效提高机器人伺服电机的过载能力
selina -- 周一, 03/20/2017 - 09:05
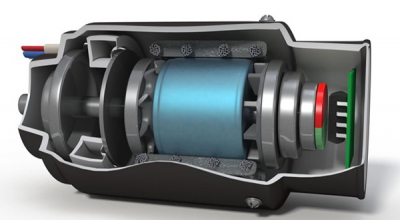
说起对工业机器人的性能要求,无非就是“快、准、狠”三字。其实这也就是对机器人关节伺服电机的要求,今天我们就来拆解一下这三字背后的含义。
其中“快”、“准”的意思大家都非常好了解,就是要求伺服电机的响应速度要快,控制精度要高。而“狠”字又怎么解呢?其实大家仔细想想,伺服电机除了又快又准外,我们对它的余下要求就是过载能力强,即“狠”了。
为智能硬件开发者、创客提供有关基于英特尔嵌入式处理器的应用技术介绍和合作伙伴方案介绍
说起对工业机器人的性能要求,无非就是“快、准、狠”三字。其实这也就是对机器人关节伺服电机的要求,今天我们就来拆解一下这三字背后的含义。
其中“快”、“准”的意思大家都非常好了解,就是要求伺服电机的响应速度要快,控制精度要高。而“狠”字又怎么解呢?其实大家仔细想想,伺服电机除了又快又准外,我们对它的余下要求就是过载能力强,即“狠”了。

在电动汽车中,电动机是非常重要的一个关键零部件,此前我们已经陆续介绍过电动机都有哪些类型?电动机有什么性能特点?此篇解析两种不同类型的电动机如何产生动力!
交流异步电动机怎样产生动力呢?
交流电动机的工作原理:通电绕组在旋转磁场里转动。

《GB/T1032-2012三相异步电动机试验方法》中电机效率的测试方法有A法、B法、C法、E法或E1法、F法或F1法、G法或G1法、H法,另外对于支持调速的电机,还有MAP图法,不同的试验方法适应不同的电动机,不同试验方法准确性也不一样,下面就让我们一起来看一下几种常用测试方法的区别。

我们先说说磁铁磁钢是什么?
磁钢其实是个含义很广的玩意,简单说来就是永磁体,传统叫吸铁石,当然磁钢的磁性相对较弱。
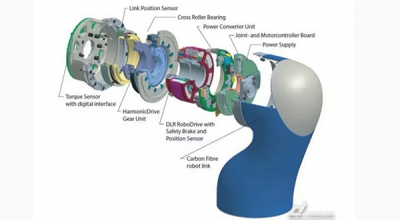
机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时间的积累。
本文以KUKA为例,分协作机器人iiwa和传统机器人KR两个大系列。
协作机器人iiwa
Jakub Szymczak, Shane O'Meara, Johnny Gealon, 和 Christopher Nelson De La Rama
简介
电路功能与优势
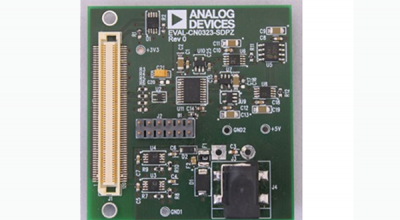
图1所示电路提供非接触式AMR(各向异性磁阻)角度测量解决方案,可在180°范围内具有1°角度精度。该电路适合高速、精确、非接触式角度测量应用。
电路提供全部必要的信号调理,包括仪表放大器、缓冲器和双通道ADC,可高效处理 AMR传感器的低电平电桥输出。
我国车用电机在全球资源条件下具有明显的比较优势,发展潜力较大。从新能源汽车的产业链来看,受益端将主要集中在核心零部件领域。国内车用驱动电机行业现状:电机业中的小行业、但制造门槛高,电机驱动系统还存在较多差距与不足,但国内政策扶持将加快产业步伐。

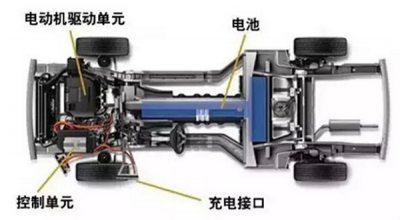
电动汽车主要是由电机驱动系统、电池系统和整车控制系统三部分构成,其中的电机驱动系统是直接将电能转换为机械能的部分,决定了电动汽车的性能指标。因此,对于驱动电机的选择就尤为重要。

现阶段关于电动汽车关键零部件的讨论,大部分主要集中在对动力电池的讨论上,而对电机电控等方面的探讨,却少之又少。究其原因,一方面是关于动力电池技术的发展上,不时有新技术与新热点出现,容易吸引媒体与读者的注意。