整定的目的:为何整定?何时需要整定?
从本质上来说,伺服系统的工作就是将指令输入和输出的误差减小到零。而将误差减小到零试图花费多大的“力气”取决于系统是被如何整定的。简单地说,整定就是调节伺服系统对于任意给定误差的反应以使系统获得给定响应。在大多数高性能伺服应用中,目标是获得对于误差的高响应速率(又称带宽),并在运转和停转时维持误差尽可能小。当然,很多应用需要较慢的响应速率;在系统运动中总会存在一定的跟踪误差。一个整定好的系统不一定要尽量快地消除误差,而是要对误差做出机器设计者所期望的反应。
一般而言,在伺服系统安装到机器上之前,应对其进行测试并确认系统空载运转平稳。如果在按装和加载前系统运行roughly,那么安装之后能实现目标性能的可能性很小。下图是 SureServo 伺服系统的整定流程和线索:

控制环流程图说明了伺服控制器驱动负载的基本原理。如图所示,伺服控制系统主要由三部分组成:
电流环、速度环、位置环
对于伺服电机使用者来说,只需要整定速度环和位置环参数。除选择电机功率型号外,电流环不需要任何用户交互,它被设定为1.8KHz的固定带宽。如果电机功率型号选错,电流环的工作性能会受影响,并有可能最终损坏电机。速度环的输出连接至电流环。速度环的工作带宽可以调节到最高450Hz。位置环的输出连接到速度环,其带宽最高可以调节到300Hz。
正如所见,电流环是响应最快的,目的是迅速处理和跟踪到速度环的输出。即便当速度环设定为最高工作带宽,电流环仍然比其快四倍,这样是为了保证系统稳定。同样,速度环应该总是比位置环响应快。否则,如果位置环更新其至速度环的目标比速度环校正误差还快,系统只可能变得不稳定。( the system has no choice but to become unstable)
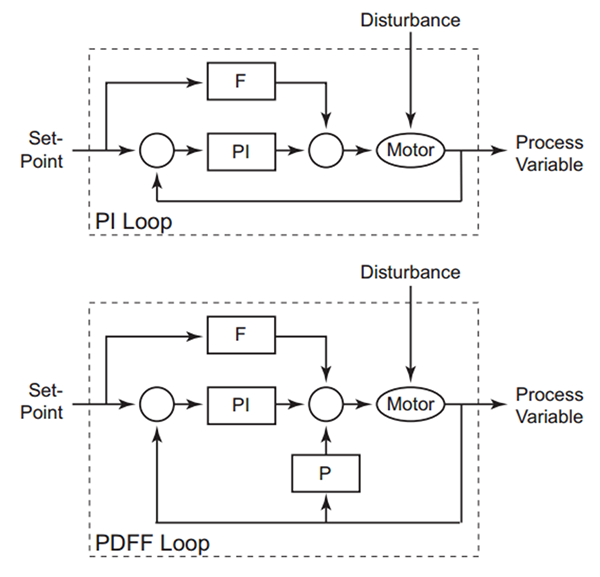
控制律
可以选择的有两种:
- PI (Proportional-Integral) 比例-积分
- PDFF (Pseudo-Derivative Feedback and Feedforward) 伪微分反馈前馈
框图如下:
可用整定模式
定义 惯量率=负载转动惯量/电机转动惯量,一般而言该值为10左右
手动输入参数。
简单模式。适用于负载大范围变化。由用户输入目标刚性和惯量率,系统自动整定一个比较保守的值
自适应自整定模式。系统在运行中根据变化的负载惯量自动动态调整参数。
固定自动整定模式。当负载惯量已知时,由用户输入目标刚性和惯量律,系统自动整定参数。负载变化范围不能太大。
本文转自:伺服电机控制器的参数整定
翻译自 SureServo Manual





