测量范围:
传感器输出信号规格支持的加速度水平,通常用±g表示。 这是器件能够测量并通过输出精确表示的最大加速度。 例如,±3g加速度计的输出与高达±3g的加速度成线性关系。 若加速到4g,则输出可能无效。 注意,极限值由绝对最大加速度规定,而不是由测量范围规定。 4g加速度不会使±3g加速度计失效。
加速度计灵敏度:
加速度(输入)变化与输出信号变化之比。 它定义加速度与输出之间的理想直线关系(图1中的灰线)。 灵敏度用特定电源电压来规定,对于模拟输出加速度计,单位通常是mV/g;对于数字加速度计,单位通常是LSB/g或mg/LSB。 它通常表示为一个范围(最小值、典型值、最大值),或表示为一个典型值加上偏差百分比(%)。 对于模拟输出传感器,灵敏度与电源电压成比例关系。例如,电源加倍,则灵敏度加倍。
温度引起的灵敏度变化一般用每°C的百分比(%)变化来表示。 温度效应由机械应力和电路温度系数共同造成。
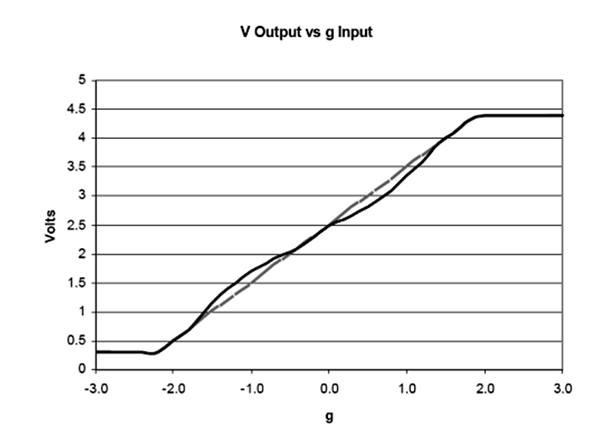
非线性度:
理想情况下,电压与加速度之间是线性关系,用器件的灵敏度来描述。 非线性度衡量实际灵敏度与理想的恒定灵敏度之间的偏差,用相对于满量程范围(%FSR)或正负满量程(%FS)的百分比来表示。 通常,FSR = FS+FS。 ADI加速度计的非线性度非常低,绝大多数情况下可忽略不计。
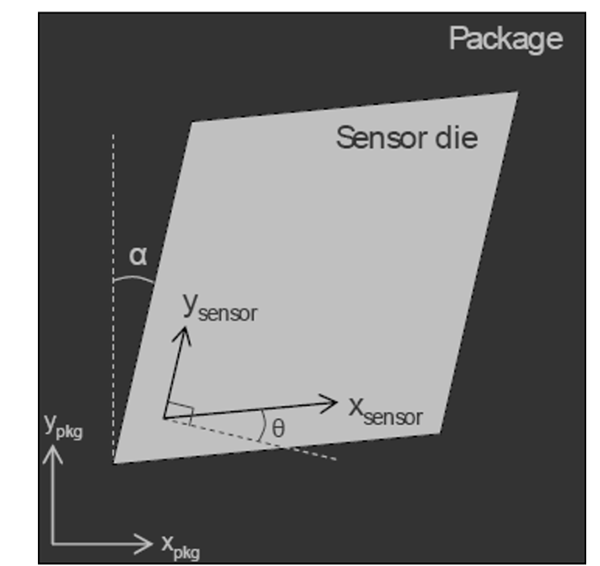
封装对齐误差:
加速度计检测轴与封装参考轴的夹角(参加图2)。 "输入轴对齐"是此误差的另一种术语。 封装对齐误差的单位为"度"。 封装技术通常会将裸片与封装的对齐精度控制在约1°以内。
(正交)对齐误差:
多轴器件之间的角度与理想角位移(通常为90°)的偏差(参加图2)。 ADI加速度计是在单片硅上采用光刻法制造而成,轴间对齐误差一般不是问题。
跨轴灵敏度:
衡量对某一轴施加一个加速度时,在另一轴上产生多大的输出,通常表示为百分比。 两个轴之间的耦合是由对齐误差、蚀刻不精确性和电路串扰共同造成。
0 g偏置电平:
指无加速度(0输入)时的输出电平。 模拟传感器通常将其表示为V或mV,数字传感器则用代码数(LSB)表示。 0 g偏置用特定电源电压来规定,通常与电源电压成比例(大多数情况下,0 g偏置标称值为电源电压的一半)。
0g偏置常常从多个方面加以规定:
*0g电压(V),规定0g加速度下输出的预期可能电压范围。
* 输出与理想值的偏差,也称为初始偏置误差,在25°C时规定,表示为加速度误差(g)或输出信号(模拟传感器为mV,数字传感器为LSB)。
* 0g失调与温度的关系,或偏置温度系数(mg/°C),描述温度每改变1 °C,输出的变化幅度。
* 偏置电压灵敏度,描述"0偏置电平"变化与电源变化的关系。 此参数的单位通常是mv/V、mg/V或LSB/V。
* 0g总误差,包括所有误差。
加速度计噪声密度:
单位为ug/rt(Hz) RMS,指噪声输出的功率频谱密度的平方根。 总噪声由下式确定:
噪声 = 噪声密度 * sqrt(BW * 1.6)
其中BW为加速度计带宽,由加速度计输出端的电容设置。
ADI加速度计的噪声为高斯噪声且不相关,因此可通过对多个加速度计的输出求均值来降低噪声。
总噪声:
相对于理想输出的随机偏差,等于噪声密度与噪声带宽平方根的乘积。 此参数的单位通常为mg-RMS。
输出数据速率:
在数字输出加速度计中,它定义数据的采样速率。 带宽指在规定输出数据速率时可以采样而不会混叠的最高频率信号。 根据奈奎斯特采样准则,带宽为输出数据速率的一半。
在模拟输出加速度计中,带宽定义为响应降至直流(或低频)加速度响应的-3dB时的信号频率。