作者:Chris Goodall、Sarah Carmichael (Trusted Positioning,Inc.)和Bob Scannell (Analog Devices, Inc.)
内容提要
光纤陀螺仪(FOG)以前曾经是环形激光陀螺仪(RLG)等其他技术的低成本替代品,现在该技术面临着新的竞争。微机电系统(MEMS)陀螺仪开始抢夺传统FOG应用的市场份额。具体来说,天线阵列稳定、农业机械控制、常规车辆导航成为MEMS和FOG对峙的战场。
为了确定用于导航应用的这两种技术之间的相似点,我们将对选定的高端MEMS陀螺仪与低端FOG陀螺仪进行比较。我们在分析中使用了导航软件和测试案例作为控制,以确定MEMS是否真正为在战术导航性能水平上使用做好了准备。
MEMS用于精确导航
过去几年中,MEMS在导航行业日益受到青睐,因为它提供更好的误差特性和环境稳定性、更高的带宽和更出色的g灵敏度,而且嵌入式运算能力的应用日益广泛,可以运行高级融合和传感器误差建模算法。新的精密惯性导航系统(INS)市场正在形成气候,MEMS技术也在进入以往被FOG技术主导的市场。从FOG到MEMS技术的一个明显转变是天线阵列稳定应用。机器控制应用也可以得益于MEMS技术的进步。以前,用户偏好价格30,000美元以上的FOG或RLG导航系统,因为其精确度和可靠性比具有代表性的1,000美元MEMS导航系统高出20倍。低成本MEMS导航系统的改进使很多应用受益极大,精密农业和UGV/UAV/USV便是其中两个典型的例子。
实时导航硬件
本例中使用的导航系统的设计目的是为电机提供高速率的高度输出,然后该电机再让车辆顶棚上的天线阵列达到稳定。天线阵列的用途是维持与地球同步卫星之间的通信。
该导航系统用作束带式INS/GNSS导航器,提供高速率的位置和速度数据。惯性测量单元(IMU)数据以1000 Hz频率流向导航滤波器,这些数据包用于预测位置、速度和高度。从双天线获取的GNSS位置、速度和航向用作对导航滤波器的更新。当GNSS不可用时,则使用磁力计来帮助初始化航向。使用气压计来帮助确定高度。特殊校准程序与导航滤波器并行发生。这些程序校准磁力计、双天线安装对准误差、IMU安装对准误差,还校准车辆振动水平以便进行静态期检测。
该系统可在两种硬件配置中工作。第一种配置包括两个FOG(检测航向和俯仰角)、一个MEMS陀螺仪(检测滚动)、三轴MEMS加速度计、三轴MEMS磁力计、MEMS气压计,传感器硬件的总物料成本(BOM)约为8,000美元(小批量)。
第二种配置包含三个MEMS陀螺仪(用于检测所有方位角),以及与前一种配置相同的三轴MEMS加速度计、三轴MEMS磁力计和MEMS气压计,总成本约为1,000美元(小批量)。这些系统的价格可能随着市场条件和订货量而波动,但通常而言,FOG的价格比MEMS高出八至十倍。
为此设计选择的MEMS陀螺仪和加速度计具有在同一价位中非常出色的偏置稳定度、正交性、g灵敏度和带宽。这种系统的主要限制是带宽要求高。很多MEMS加速度计提供高带宽,但MEMS陀螺仪通常仅有100 Hz或更低的带宽。对于普通车辆导航,这一点还不会产生影响,但此系统是针对需要适应高速率控制的应用设计的。此外还有几种MEMS陀螺仪提供良好的偏置稳定度,但带宽降低或噪声很高。为本系统选择的MEMS陀螺仪在带宽和性能之间达到了平衡。表1给出了所选MEMS的实际规格。
表1 MEMS IMU规格(ADIS16485)

惯性MEMS的采用率处于上升态势。因此,人们为发展该技术进行了大量投资。
本系统中使用的MEMS陀螺仪采用多核架构,该架构在稳定度、噪声、线性度和线性g性能之间达到了优化平衡。完全差分四谐振器与片内高性能信号调理密切配合,使得谐振器的必需响应范围最小,位于高度线性区,并且提供高抗振动性能。
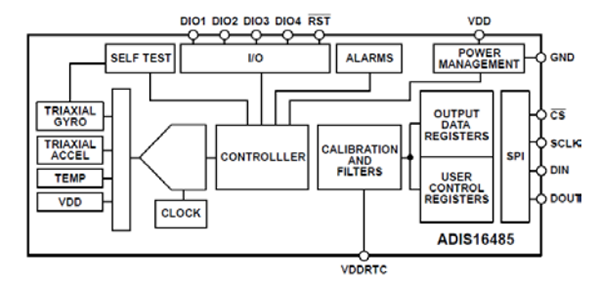
由于MEMS陀螺仪和加速度计集成到多轴IMU中(参见图1),传感器的x/y/z正交性可能成为主要误差源。通常将这种误差规定为跨轴灵敏度或对准误差。常见规格是±2%跨轴灵敏度。本系统的IMU具有0.087%的跨轴灵敏度(0.05度正交性)。更重要的是,由于器件特定的校准在出厂前完成,此规格在温度范围内有效。对于特定旋转速率,例如在偏航轴上,正交轴的速率输出等于CrossAxisSensitivity*YawRate,即使滚动轴和俯仰轴上的实际旋转为零。2%的跨轴误差通常会导致除了本有的陀螺仪噪声之外,还会增加一个数量级的轴外噪声;而此处IMU的0.087%灵敏度与本有的陀螺仪噪声水平达到精确平衡。
可用带宽及其与跨轴相位匹配能力的关系对于多轴设计也至关重要。有些陀螺仪结构带宽有限,与总降噪有关,而有些结构带宽有限(通常低于100 Hz)是由于反馈电子器件中使用的传感器处理导致的。这可能导致通过传感器信号路径的相位相关误差波动增加,特别是在卡尔曼滤波器中。MEMS IMU的可用带宽为330 Hz,采用嵌入式的可调滤波系统,提供合理平衡的方法,最大程度地减少总误差源,并通过嵌入式滤波实现系统特定的误差优化,即便在场中也是如此。
在此MEMS IMU中使用的核心传感器具有固有的振动抑制能力和线性度,不仅使得它们的性能适合高动态应用,而且还在极端环境条件下具有稳定性和可预测性。本设计使用的FOG是综合权衡价格、性能和尺寸这几种因素选择的。FOG的带宽、偏置稳定度和噪声水平是最终选择传感器的决定性因素。表2给出了重要的性能参数。与MEMS相比,FOG具有更好的偏置稳定度,角向随机游动也有了显著改进。
表2. FOG规格(uFors-6U)
导航软件
实时导航软件在1,000 Hz下处理解决方案,结合使用传统的SINS机制和测量更新。测量更新来自多个来源,包括:
1. GNSS位置和速度
2. 双天线航向更新
3. 磁力计航向更新
4. 气压计高度更新
5. 来自车辆OBDII的可选速度更新
所有更新都用于纠正仅INS解决方案的漂移,但更新本身也可能中断或不准确。双天线航向更新具有良好的精确度,但易受多路径影响。因此,双天线航向更新仅在开放天空环境中是可靠的。对于来自GNSS接收器的位置和速度预测,情况同样如此,也会从SBAS受益。
来自磁力计的航向预测可能由于在校准期间的垂直可观察性不佳,而受到较大倾斜角的影响。磁力计在含铁物质周围也可能不精确,例如在其他车辆旁边行驶时。因此,磁力计用于在GNSS不可用时帮助初始化系统,或在GNSS长时间中断时(例如20分钟)帮助减小航向漂移。
气压计用于在GNSS不可用或不精确时帮助获取高度读数。速度更新用于在没有GNSS更新的情况下防止速度漂移,特别是在沿航迹方向。这些速度更新也可帮助减少解决方案的位置不确定性,这有助于抑制不准确的GNSS位置更新。整个导航软件的设计目的是在任何GNSS条件下提供精确结果。
导航测试
为了正确比较两个系统,我们设计了三个系统级导航基准测试:
1. 在具有良好GNSS信号的开放天空环境下评估滚动、俯仰和航向的精确性。
2. GNSS多路径场景,例如在城市中心区,由于存在高层建筑,GNSS解决方案质量可能不好。本测试的目的是比较滤波位置性能,它也会显示高度和速度误差。
3. 仅INS性能测试,旨在评估INS位置漂移,也代表速度和高度性能。
开放天空高度结果
在GPS可用且位于多个卫星的直射范围内的情况下,两个系统的定位和速度结果是相似的。方位角(滚动、俯仰和航向)是我们比较的主要导航参数,因为它们在很大程度上是由陀螺仪性能决定的。
表3. 开放天空高度结果
当GNSS可用时,两种系统的高度性能几乎是相同的,但FOG具有大约5%的优势。
不良信号GNSS定位结果
下一个测试的目标是在存在GNSS多路径的情况下比较两个系统。行驶轨迹位于卡尔加里市的中心城区,包括一些很窄的小巷,车行缓慢,同时周围布满高层建筑。现在,性能测试重点包括了定位结果,因为在缺少高质量GNSS测量的情况下,陀螺仪可能对位置性能产生很大影响。此测试结果显示两个系统的性能相当。但是,FOG系统高出大约20%至30%。
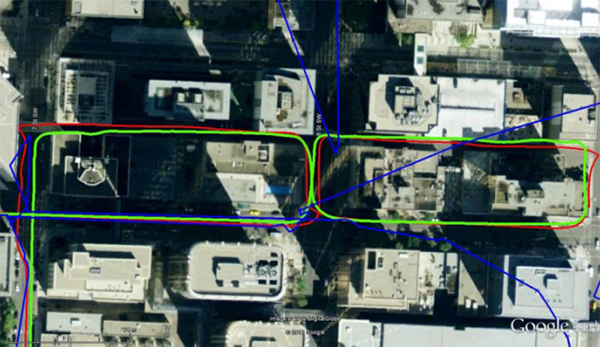
图2显示了仅GPS解决方案的示意图。在对复杂的中心城区行驶轨迹进行导航时,本测试使用的高精度GPS接收器遇到了严重的信号反射。仅GPS解决方案的误差多达100米。

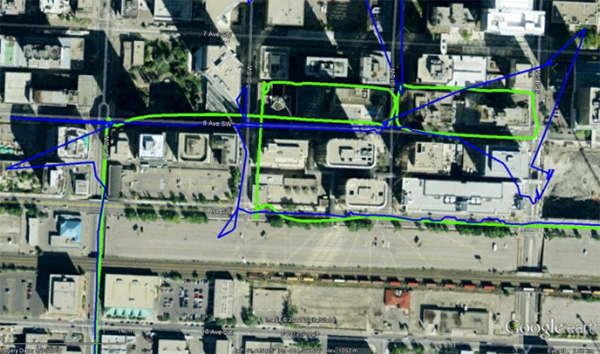
红色的FOG集成解决方案(图3)清晰显示中心城区车辆的行驶路径,精确到10米以内。

MEMS解决方案在图4中以绿色显示,始终在15米之内。该解决方案更易受到不精确GNSS位置更新的影响,因为INS预测的权重较低。
为帮助MEMS解决方案克服不精确的GPS更新,我们使用了额外的传感器。图5显示将OBDII添加到系统以获取车辆速度。
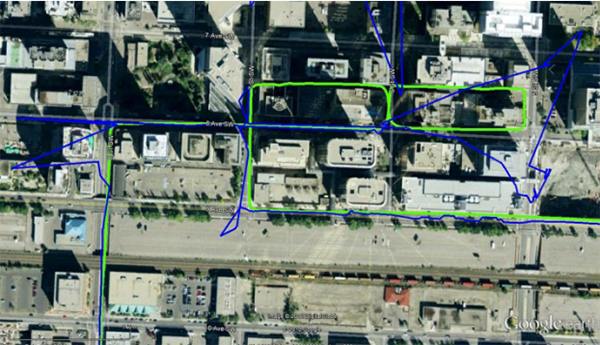
MEMS解决方案始终在10米之内,甚至可能稍优于没有OBDII的FOG,如图6中的放大图所示。
仅INS结果:示例和基准
两个系统之间的最后一项比较是仅INS导航测试。系统使用开放天空GNSS更新进行融合。然后断开两个系统的天线连接,持续4.5分钟,位置漂移用作性能指标。在此时间内行驶的距离约为5500米。
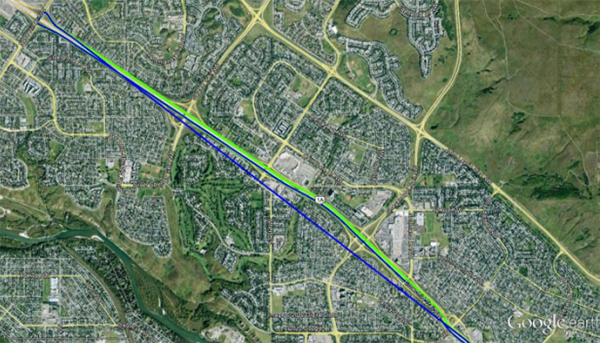
图7显示了整个轨迹。蓝色直线从右下方延伸至左上方,在右下方GPS断开连接,在左上方GPS重新连接。
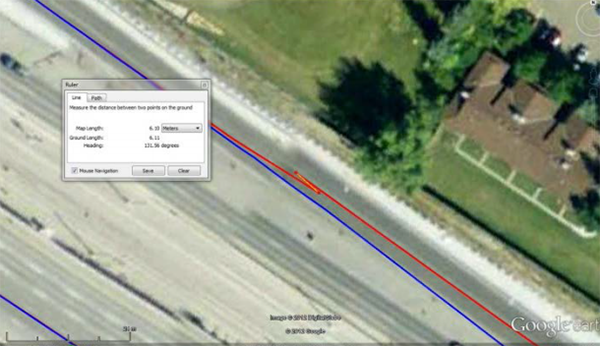
在这次GNSS中断期间,FOG系统的运行情况很好,最大漂移为7米,如图8所示。5分钟之后,FOG系统的典型漂移性能基准测试结果为25米,因此这次特殊中断的情况略好于典型性能。
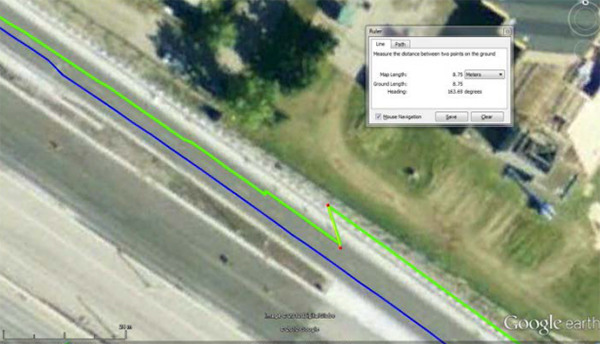
在没有GNSS更新的情况下,MEMS系统在4.5分钟之后的漂移为75米。此类漂移大多为沿航迹误差,主要是由于加速计导致的。MEMS系统的基准测试结果是在没有GNSS更新的情况下,5分钟后的典型漂移为75米,比FOG漂移大三倍左右。

为MEMS系统添加OBDII更新之后,漂移改进至小于10米,与FOG解决方案相当。在没有GNSS更新的情况下,带有OBDII的MEMS系统的典型基准性能在5分钟之后产生大约30米的位置漂移,也与FOG基准结果相当。
结束语
FOG和MEMS两者相比非常接近,特别是现在MEMS的性能正在接近FOG战术级性能水平。FOG仍然在性能上具有优势,但其成本却比MEMS高出10倍。如果可以使用GNSS,而且应用的目的是在开放天空环境中运行,则MEMS可以取代一些低端FOG。如果应用的目的是在信号不良的GNSS环境中使用,MEMS也可以取代一些FOG 系统,但性能要低20%至30%。
在独立INS性能方面,FOG仍然具有优势,但如果应用能够接收车辆或平台速度更新,则MEMS系统可以达到与独立FOG系统相同的性能水平。
随着MEMS技术的持续进步,以及其他传感器(例如OBDII)的辅助,MEMS取代FOG技术可能在不久的将来实现。
作者简介
Chris Goodall博士在Trusted Positioning Inc.担任CEO/CTO职位,也是该公司的共同创始人。Chris在长达8年时间内始终致力于开发、部署和推广多传感器导航系统。他在滑铁卢大学获得系统设计工程专业的艺术和科学学士学位,并在卡尔加里大学获得测绘工程专业博士学位。Chris发表了40多篇文章,并且申请了6项与集成导航相关的专利。
Sarah Carmichael在Trusted Positioning Inc.担任营销专员,负责所有形式的营销和公关材料。Carmichael在卡尔加里大学Haskayne商学院获得营销专业的商学学士学位。
Bob Scannell是ADI公司惯性MEMS产品的业务开发经理。他在ADI公司工作已超过15年,先后从事传感器、数字信号处理、无线产品的各种技术营销和业务开发工作。之前他曾在Rockwell International公司从事设计和市场方面的工作。他拥有美国加州大学电气工程学士学位和美国南加州大学计算机工程硕士学位。