Jens Sorenson和Richard Anslow ADI公司
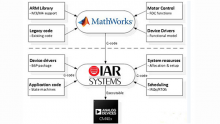
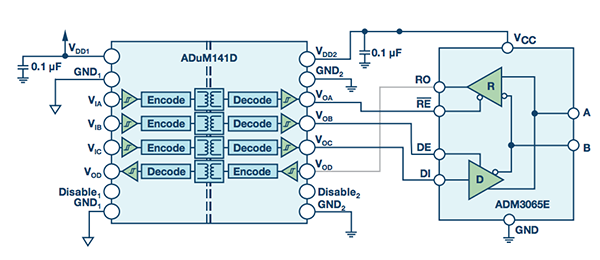
旋转编码器广泛用于工业自动化系统中。此类编码器的典型应用是电力机械,其中编码器连接到旋转轴,从而向控制系统提供反馈。虽然编码器的主要用途是角度位置和速度测量,但系统诊断和参数配置等其他特性也很常见。图1显示了一个电机控制信号链,其利用RS-485收发器和微处理器连接绝对编码器(ABS编码器)从机和工业伺服驱动器主机,以实现对交流电机的闭环控制。
伺服驱动器和ABS编码器之间的RS-485通信链路通常要求最高达16 MHz的高数据速率和低传播延迟时序规格。RS-485线缆延伸长度最大值通常是50米,但有时候也可能长达150米。对数据通信而言,电机控制编码器应用是具有挑战性的环境,因为电气噪声和长电缆会影响RS-485信号传输的完整性。本文重点阐述电机控制应用采用ADI公司50 Mbps (25 MHz) ADM3065E RS-485收发器和ADSP-CM40x混合信号控制处理器的主要好处。
ADM3065E RS-485收发器设计用于在电机控制编码器之类恶劣环境中可靠地工作,并且具备增强的抗扰度和(IEC) 61000-4-2 ESD(静电放电)鲁棒性。

抗扰度
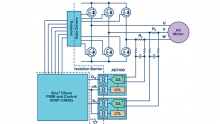
RS-485信号传输是平衡的差分式传输,本身便能抗干扰。系统噪声均等地耦合到RS-485双绞线电缆中的每条导线。一个信号的发射与另一个信号相反,耦合到RS-485总线的电磁场彼此抵消。这降低了系统的电磁干扰(EMI)。此外,ADM3065E增强的2.1 V驱动强度支持在通信中实现更高的信噪比(SNR)。给ADM3065E增加信号隔离可利用ADuM141D轻松实现。ADuM141D是一款采用ADI公司iCoupler®技术的四通道数字隔离器。ADuM141D的工作数据速率最高可达150 Mbps,因此它适合与50 Mbps ADM3065E RS-485收发器一起工作(参见图2)。直接功率注入(DPI)法测量器件抑制注入到电源或输入引脚的噪声的能力。ADuM141D采用的隔离技术已通过测试,符合DPI IEC 62132-4标准。ADuM141D抗扰度性能超过同类产品。ADuM141D在整个频率范围内保持了出色的性能,而其他隔离产品在200 MHz至700 MHz频段出现位错误。
IEC 61000-4-2 ESD性能
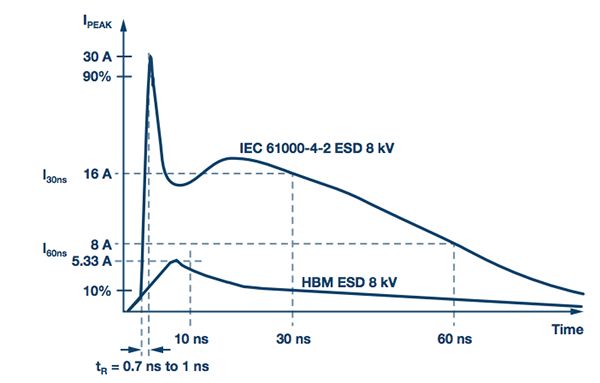
编码器到电机驱动器的裸露RS-485连接器和线缆上的ESD是一个常见系统危险因素。与变速电力驱动系统的EMC抗扰度要求相关的系统级IEC 61800-3标准,要求最低±4 kV(接触)/±8 kV(空气)的IEC 61000-4-2 ESD保护。ADM3065E超过了这一要求,提供±12 kV(接触)/±12 kV(空气)的IEC 61000-4-2 ESD保护。图3所示为IEC 61000-4-2标准中的8 kV接触放电电流波形与人体模型(HBM) ESD 8 kV波形的对比。从图4中可以看出,两个标准规定的波形形状和峰值电流是不同的。与IEC 61000-4-2 8 kV脉冲关联的峰值电流为30 A,相应的HBM ESD峰值电流比该数值的五分之一还小,为5.33A。另一差异为初始电压尖峰的上升时间,对于IEC 61000-4-2 ESD,上升时间为1 ns,相较于与HBM ESD波形关联的10 ns时间要快得多。与IEC ESD波形关联的功率值显著大于HBMESD波形的相应值。HBM ESD标准要求待测设备(EUT)经受3次正放电和3次负放电,而IEC ESD标准则要求10次正放电和10次负放电测试。与标称多种HBM ESD保护级别的其他RS-485收发器相比,具有IEC 61000-4-2 ESD额定值的ADM3065E更适合在恶劣环境中工作。
EnDat通信协议
编码器使用的通信协议有很多种,例如EnDat、BiSS、HIPERFACE和Tamagawa。尽管有区别,但编码器通信协议在实现方面具有相似点。这些协议的接口是串行双向管道,符合RS-422或RS-485电气规范。虽然硬件层有相同之处,但运行每种协议所需的软件是独一无二的。通信堆栈和所需的应用程序代码均特定于协议。本文主要说明EnDat 2.2接口主机侧的硬件和软件实现。
延迟影响
延迟分为两类:第一类是电缆的传输延迟,第二类是收发器的传播延迟。电缆延迟由光速和电缆的电介质常数决定,典型值为6 ns/m至10 ns/m。当总延迟超过半时钟周期时,主机和从机之间的通信就会出故障。对此,设计人员有如下选择:
* 降低数据速率
* 减小传播延迟
* 在主机侧提供延迟补偿
选项3可同时补偿电缆延迟和收发器延迟,因此是确保系统能以高时钟速率通过长电缆运行的有效办法。缺点是延迟补偿会增加系统的复杂性。在延迟补偿不可行的系统中,或在电缆较短的系统中,使用传播延迟短的收发器具有明显的优势。低传播延迟使得时钟速率可以更高,而且不必在系统中引入延迟补偿。
主机实现
主机实现包括串行端口和通信堆栈。编码器协议并不兼容标准端口(例如UART),故无法使用大多数通用微控制器上的外设。不过,利用FPGA的可编程逻辑可以在硬件中实现专用通信端口,并支持延迟补偿等高级特性。FPGA方法虽然很灵活,可以针对具体应用进行定制,但也有缺点。与处理器相比,FPGA成本高,功耗大,而且上市时间长。
本文讨论的EnDat接口是在ADI公司的ADSP-CM40x上实现,后者是一款针对电机控制驱动器而开发的处理器。除了脉宽调制器(PWM)定时器、模数转换器(ADC)和sinc滤波器等用于电机控制的外设以外,ADSP-CM40x还有高度灵活的串行端口(SPORT)。
这些SPORT可以仿真多种协议,包括EnDat和BiSS等编码器协议。由于ADSP-CM40x的外设很丰富,所以它不仅能执行高级电机控制,而且能与编码器接口。换言之,无需使用FPGA。
测试设置
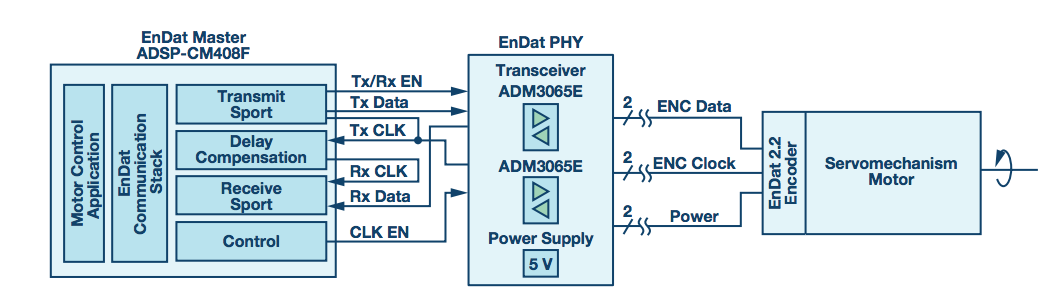
EnDat 2.2测试设置如图4所示。EnDat从机是Kollmorgen的一款标准伺服电机(AKM22),EnDat编码器(ENC1113)安装在轴上。三对线(数据、时钟和电源线)将编码器连接到收发器板。EnDat PHY上有两个收发器和用于编码器的电源。一个收发器用于时钟,另一个收发器用于数据线路。EnDat主机由ADSP-CM40x结合标准外设和软件而实现。发送端口和接收端口均利用灵活的SPORT实现。EnDat协议包括多种长度不同的帧,不过这些帧全都基于相同序列,如图5所示。首先,主机发送命令至从机,然后从机处理命令并执行必要的计算。最后,从机将结果送回主机。

发送时钟(Tx CLK)由处理器ADSP-CM40x产生。由于系统延迟,来自编码器的数据在返回处理器之前会与发送时钟错相。为补偿传输延迟tDELAY,处理器还会产生一个接收时钟(Rx CLK),它比发送时钟延迟tDELAY。让接收时钟与自从机收到的数据同相是补偿传输延迟的有效办法。
来自处理器的时钟信号是连续的,而EnDat协议规定,时钟只能在通信期间施加于编码器。在所有其他时候,时钟线路必须保持高电平。为此,处理器产生一个时钟使能信号CLK EN,其被送至ADM3065E数据使能引脚。恰好两个时钟周期(2T)之后,主机开始在Tx DATA上发出命令。
命令有6位长,随后是两个0位。为了控制收发器的数据方向,处理器在传输时将Tx/Rx EN位置1。在从机准备响应的同时,系统进入等待状态,主机继续施加时钟,但数据线无效。当从机准备就绪时,数据线接收数据被拉高,然后立即发送响应。收到n位响应之后,主机将CLK EN信号设为低电平以停止时钟。与此同时,ENC CLK信号变为高电平。数据流为半双工式, ENC数据图为画在一起的收发数据流。
实验结果
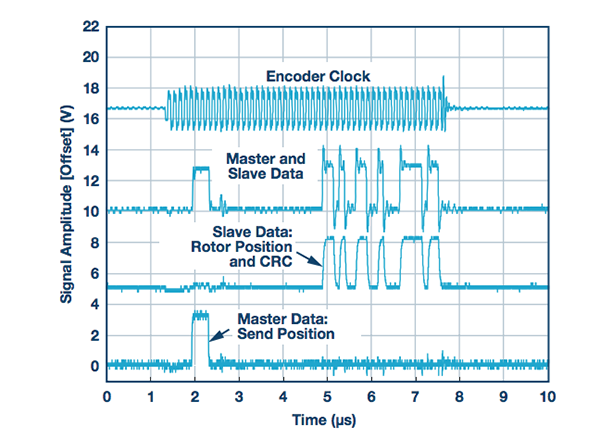
图6显示了EnDat系统的测试结果。测试使用的时钟频率为8 MHz,延迟补偿通过接收时钟相移实现。底部信号是来自EnDat主机的命令。此处显示的命令为“发送位置”,其前面是两个0,接着是六个1,最后又是两个0。该命令总共有10位。编码器的响应是从顶部起的第三个信号。合并数据线是从顶部起的第二个信号。最后,顶部信号是施加于编码器的时钟。
作者简介
Jens Sorensen是ADI公司系统应用工程师,负责工业应用的电机控制解决方案。他的主要兴趣在于控制算法、电源电子和控制处理器。Jens目前专注工业应用,而在早期职业生涯中致力于开发家用电器和汽车应用中的电机控制和电源电子元件。联系方式: jens.sorensen@analog.com 。
Richard Anslow是ADI公司产品应用工程师,负责工业应用隔离接口解决方案。Richard的主要兴趣包括工业自动化、能源和军事航空航天应用的通信接口与隔离鲁棒性。Richard毕业于爱尔兰利默里克大学,获工程学士和硕士学位。联系方式: richard.anslow@analog.com 。