原创: 谭祥军 模态空间
对于旋转机械而言,动平衡是一个经常会遇到的问题。如果不平衡量过大会导致更大的振动噪声问题,同时降低了设备的使用寿命、效率转化等。因此,旋转机械的NVH分析必然包括平衡,有效地减少动平衡,可优化设备的NVH性能。
1、什么是不平衡
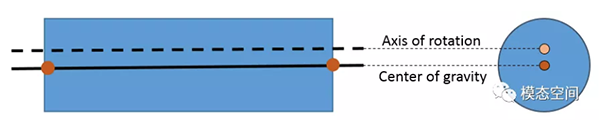
不平衡是由旋转轴上的质量分布不均匀导致的。当质心位置与作用在转子上的离心力的旋转中心不一致时,就会出现不平衡。通常,不平衡分为静不平衡、耦合不平衡和动不平衡。
为了平衡处于不平衡的旋转轴(或其他旋转部件),必须在旋转部件特定位置上增加或移除一定的质量。因此,进行平衡处理包括在旋转部件上确定相应的位置和质量,以便降低不平衡量。
不平衡会导致产生过大的振动:
* 由于振动过大导致噪声过大
* 降低轴承或其他部件的寿命
* 增大效率损失
* 存在安全隐患
2、不平衡产生的原因
导致不平衡的原因有多种,包括质量分布不均、轴不直、运行间隙、轴弯曲和安装不良等多种原因:
* 质量分布不均匀:沿着旋转中心,质量分布不均匀,如图1所示
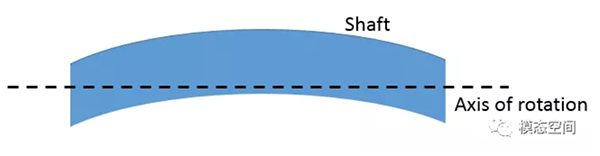
* 轴不直:轴本身不直,可能在生产轴时,加工成了这样,或者由于弹性特性发生了变形。
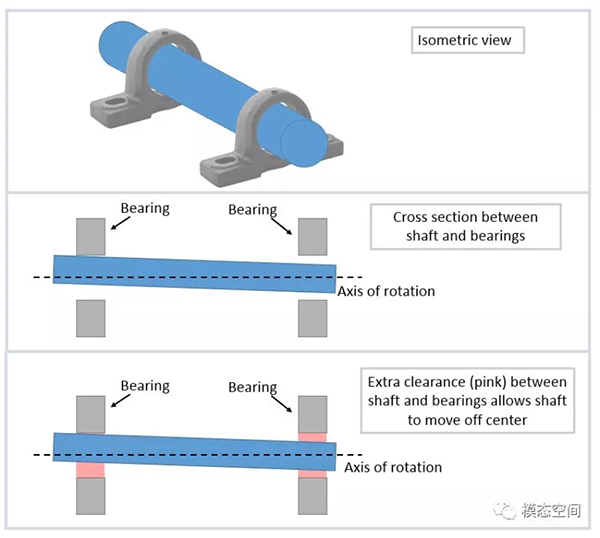
* 间隙:通用接头、花键、轴承和其他部件的运动间隙使得轴的运动偏离中心。
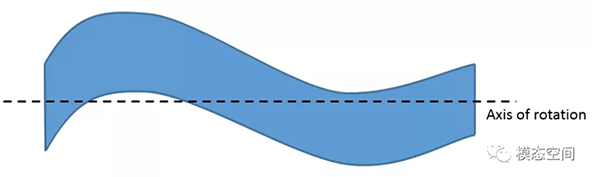
* 轴弯曲:如果某个运行转速,如临界转速,激起了一个弯曲共振,那么,轴将发生弯曲变形。
安装不良:旋转部件,如轴、叶片自身99.5%都是平衡的,但装配的叶片、轴等旋转部件99.5%都是平衡的吗?答案是否定的。对于安装而言,经常存在不对中的情况,而不对中又分为轴线角度错位(轴中心线相交但不平行)和平行偏置(轴中心线平行但不相交),如图5所示。另外,通常不对中很少只存在一种类型,更多是两种类型的组合。
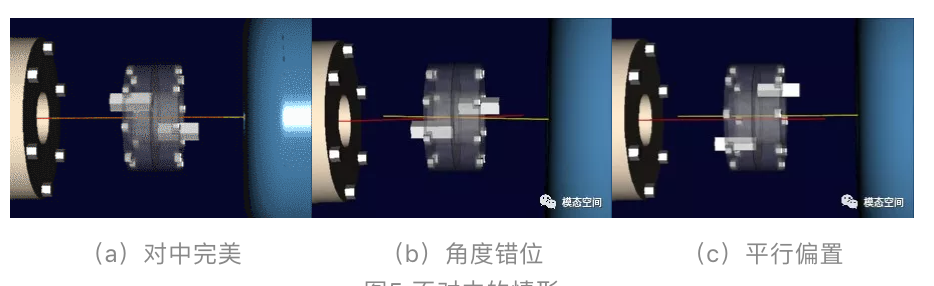
对于角度错位而言,通常轴向1倍频振动大,但也可能是2倍频或3倍频;径向振动的幅值可能还会低于轴向振动;径向振动的大小依赖于中心线的相交位置,如果角度太大,通过联轴器的轴向相对位移明显。对于中心线存在平行偏置而言,径向1倍频的振动更大;轴向2倍频振动可能同一1倍频一样大甚至更大。
3、不平衡的类型
不平衡分为静不平衡、耦合不平衡和动不平衡。
1)静不平衡(单面)
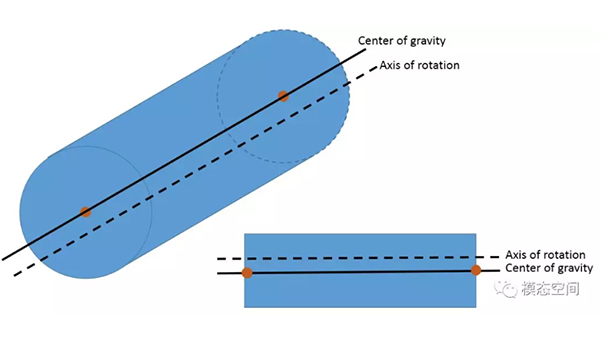
当惯性主轴与旋转几何中心平行时,就会出现静不平衡,如图6所示。如果没有其他问题存在,它只会引起纯正弦振动,因此,峰值出现在1倍频处。
对于静不平衡,由于不平衡量引起的离心力F计算如下
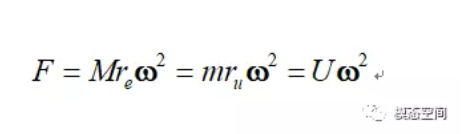
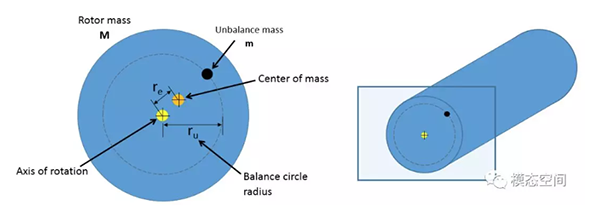
其中,U是不平衡量,M是转子质量,re是质心与旋转中心的距离,m是不平衡的质量,ru是旋转中心与不平衡圆的距离,ω是转子的角速度,形象化的示意如图7所示。
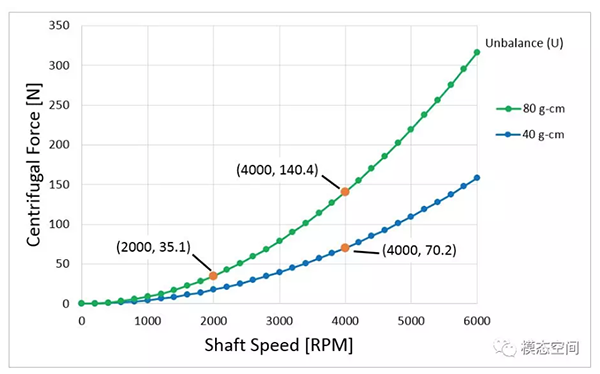
不平衡量的单位是【质量】×【距离】,常用的单元是克-厘米[g-cm]。图8是离心力与转速的关系图。显然,随着转速的增加,不平衡量增加,离心力也增加。注意到,在某一转速下,不平衡的质量加倍会使得离心力加倍。而转速加倍会导致离心力变为原来的4倍。为了修正静不平衡,必须在轴的单个截面上增加或移除一定的质量。
2)耦合的不平衡(双面)
当旋转轴在两个不同的截面有两个相等的不平衡量,且相位相差180度时,就会出现耦合的不平衡,如图9所示。这将导致旋转轴通过惯性主轴时不平行。
为了补偿耦合的不平衡,质量块必须增加在两个截面。
3)动不平衡(双面)
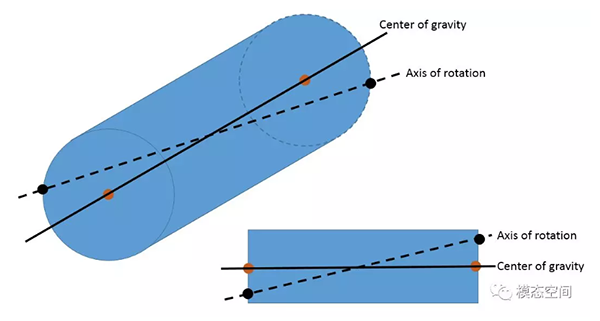
动不平衡是不平衡类型中最常用的,它是静不平衡和耦合不平衡的组合。当惯性主轴与旋转几何中心不相交也不平衡时,就会出现动不平衡。
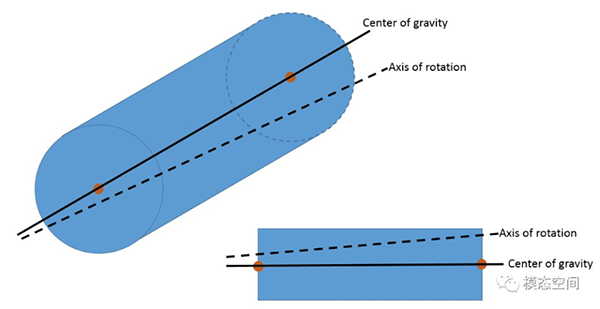
动不平衡会引起系统晃动或倾斜。为了补偿它,必须在两个截面增加质量。
4)单面和双面动平衡
平衡包括在轴上的单面或多面增加质量。
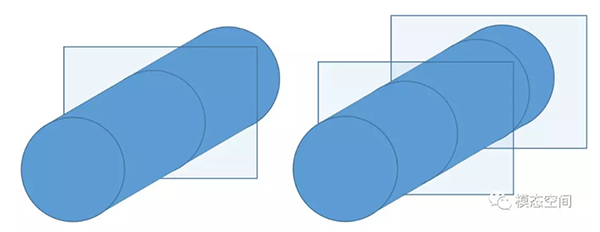
单面动平衡只在轴的一个截面上增加质量,因而,它只能补偿静不平衡。对于单面动平衡而言,径向振动峰值出现在1倍频处,两个轴承之间振动同相位(同步),如图12所示。
双面动平衡在轴的两个截面上增加质量,因而,它只能补偿耦合不平衡和动不平衡。对于双面动平衡而言,径向振动峰值也出现在1倍频处,两个轴承之间振动反相位(异步),如图13所示。
参考:
http://www.vibrationschool.com/mans/SpecInter/SpecInter06.htm
https://community.plm.automation.siemens.com/t5/Testing-Knowledge-Base/B...(翻译了此文)
本文转自:什么是动平衡?