新一代军用通信系统挑战
selina -- 周五, 03/22/2019 - 10:27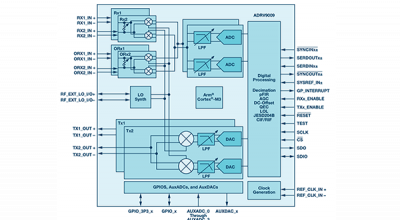
Wyatt Taylor ADI公司航空航天和防务系统工程师负责人
为智能硬件开发者、创客提供有关基于英特尔嵌入式处理器的应用技术介绍和合作伙伴方案介绍
Wyatt Taylor ADI公司航空航天和防务系统工程师负责人

Frederik Dostal ADI 公司

Eko Lisuwandi ADI公司设计部门主管
背景知识

Tony Armstrong ADI公司电源产品营销总监
简介
作者:Anton Patyuchenko
Wilhelm Conrad Rötgen于1895年发现了X射线,让他获得了第一个诺贝尔物理学奖,也为医疗成像领域奠定了基础。自那以后,X射线技术已经发展成为一门广泛的科学学科,从最广泛的意义上说,它是指众多用于人体内部的无创可视化技术。

作者:Kyle Lawrence
高功率LED在现代照明系统中的应用数量不断激增,涵盖汽车前照灯、工业/商业标识、建筑照明以及各种消费电子等应用。行业之所以转向LED技术,是因为固态照明与传统光源相比具有明显的优势:电能转换为光输出不仅效率高,而且使用寿命长。
Tony Armstrong和Steve Knoth ADI 公司
Tony Armstrong ADI 公司

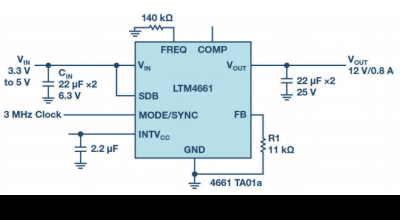
作者:Victor Khasiev

Nicola O’Byrne ADI公司高级系统应用 工程师