作者:Harvey Weinberg(ADI MEMS感测器技术部门应用工程事业群主管)
长久以来偏压稳定度被视为维持陀螺仪稳定度的重要指标,但在大多数的实际应用中,振动敏感度往往也是另个重要关键。因此,为提升陀螺仪稳定性,须同时考量偏压稳定度及振动敏感度。选择陀螺仪时,须要考虑将最大误差源最小化。在大多数应用中,振动敏感度是最大的误差源。
其它参数可以轻松地透过校准或求取多个感测器的平均值来改善。偏压稳定度是误差预算较小的元素。 浏览高性能陀螺仪资料手册时,多数系统设计师关注的第一个要素是偏压稳定度规格。毕竟其描述的是陀螺仪的解析度下限,理所当然是反映陀螺仪性能的最佳指标。然而,实际的陀螺仪会因为多种原因而出现误差,使得使用者无法获得资料手册中宣称的高偏压稳定度。的确,可能只有在实验室内才能获得那么高的性能。传统方法是借助补偿来最大程度地降低这些误差源的影响。
本文将讨论多种此类技术及其局限性。最后,我们将讨论另一种替代范例--根据机械性能选择陀螺仪,以及必要时如何提高其偏压稳定度。 温度补偿克服环境误差 所有中低价位的MEMS陀螺仪都有一定的时间,零点偏置和比例因数误差,此外还会随温度而发生一定的变化。因此,对陀螺仪进行温度补偿是很常见的做法。一般而言,陀螺仪整合温度感测器之目的就在于此。温度感测器的绝对精确度并不重要,重要的是可重复性及温度感测器与陀螺仪实际温度的紧密耦合。
现代陀螺仪的温度感测器几乎毫不费力就能达到这些要求。 许多技术可以用于温度补偿,如多项式曲线拟合、分段线性近似等。只要记录了足够数量的温度点,并且在校准过程中采取充分措施,那么具体使用何种技术是无关紧要的。例如,在每个温度的放置时间不足是一个常见的误差源。然而,不管采用何种技术,无论有多细心,温度迟滞,亦即透过冷却与加热达到某一特定温度时的输出之差,都将是限制因素。
图1所示为陀螺仪ADXRS453的温度迟滞回路。温度从+25℃变为+130℃,再变为-45℃,最后回到+25℃,与此同时记录未补偿陀螺仪的零偏压测量结果。加热周期与冷却周期中的+25℃零偏压输出存在细微的差异(本例中约为0.2o/s),这就是温度迟滞。此误差无法透过补偿来消除,因为无论陀螺仪上电与否,它都会出现。此外,迟滞的强度与所施加的温度「激励」量成比例。也就是说,施加于元件的温度范围越宽,则迟滞越大。

假如应用装置允许在启动时进行零偏压重置(即无旋转时启动)或者在现场将零偏压归零,则可以忽略此误差。否则,这可能就会成为偏压稳定度的限制因素,因为我们无法控制运输或是储存的条件。 设置机械式抗振动装置 改善敏感度 理想情况下,陀螺仪仅测量旋转速率,无关其他。但实际应用中,由于机械设计不对称或微加工不够精确,所有陀螺仪都有一定的加速度敏感度。
事实上,加速度敏感度有多种外在表现,其严重程度因设计而异。最显著的通常是对线性加速度的敏感度(或g敏感度)和对振动校正的敏感度(或g2敏感度)。由于多数陀螺仪应用所处的设备是绕地球的1 g重力场运动或在其中旋转,因此对加速度的敏感度常常是最大的误差源。 成本极低的陀螺仪一般采用极其简单紧凑的机械系统设计,抗振性能未经优化(它优化的是成本),因而振动可能会造成严重影响。1000o/h/g(或0.3o/s/g)以上的g敏感度也不足为奇,比高性能陀螺仪差10倍以上。
对于这种陀螺仪,偏压稳定度的好坏并无多大意义,陀螺仪在地球的重力场中稍有旋转,就会因为g和g2敏感度而产生巨大的误差。一般而言,此类陀螺仪不规定振动敏感度被认为非常大。 较高性能的MEMS陀螺仪则好得多。表1列出几款高性能MEMS陀螺仪之规格。对于这一类别中的多数陀螺仪,g敏感度为360o/h/g(或0.1o/s/g),某些低于60o/h/g,远远优于极低成本的陀螺仪。但是,对于小到150mg(相当于8.6o倾斜)的加速度变化,即使其中最好的陀螺仪也会超出其额定偏压稳定度。

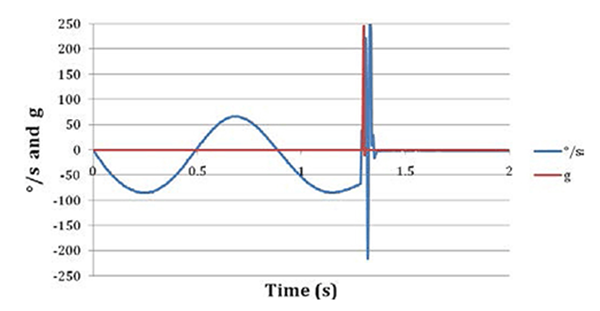
有些设计师试图利用外部加速度计来补偿g敏感度(通常是在IMU应用中,因为所需的加速度计已经存在),这在某些情况下确实可以改善性能。然而,由于多种原因,g敏感度补偿无法获得完全的成功。大多数陀螺仪的g敏感度会随著振动频率变化而变化。图2显示了Silicon Sensing CRG20-01陀螺仪对振动的回应。
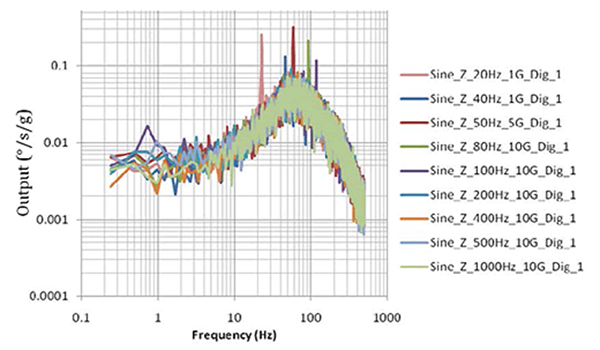
值得注意的是,虽然陀螺仪的敏感度在额定规格范围内(在一些特定频率处略有超出,但这些可能不重要),但从DC到100Hz,其变化率为12:1,因此无法简单地透过测量DC时的敏感度来执行校准。确实,要求根据频率改变敏感度的补偿方案将非常复杂。 图3所示为ADXRS646陀螺仪在相似条件下的响应。有些陀螺仪会比其他陀螺仪易于进行g敏感度补偿。但不幸的是这项资讯几乎从来不会出现在资料手册当中,必须由使用者自行去发掘,往往极耗心力,但在系统设计过程中,常常没有时间等待惊喜出现。

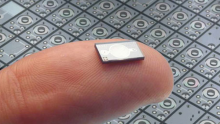
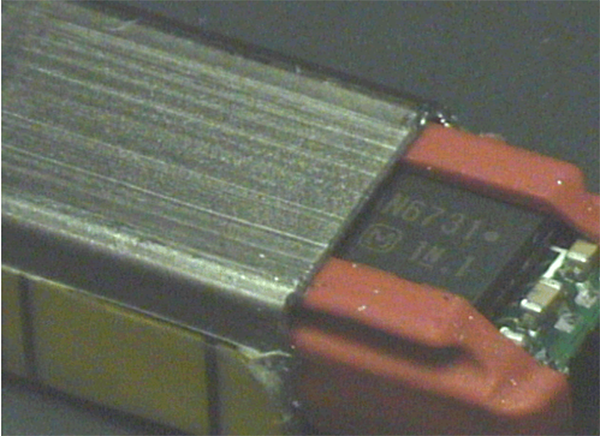
另一个困难是将补偿加速度计与陀螺仪的相位响应相匹配。假如陀螺仪的相位响应与补偿加速度计没有良好的匹配,那么高频率振动误差实际上可能会被放大。由此便可得出另一个结论:对于大多数陀螺仪,g敏感度补偿仅在低频时有效。 振动校正常常不作规定,原因可能是差得令人尴尬,或是不同装置差异巨大。也有可能只是因为陀螺仪生产厂商不愿意测试或是设定所导致的(公平的来说,测试可能比较困难)。不论是何者,振动校正必须引起注意,因为它无法以加速度计进行补偿。不同于加速度计响应,陀螺仪的输出误差会被校正。 要改善g2敏感度,最常见的策略就是增加一组机械式抗振动设置,例如图4中所示。图中为从金属帽殼封装中部份移出的Panasonic汽车陀螺仪。此一陀螺仪元件以橡胶抗振动设置与金属帽殼隔离。
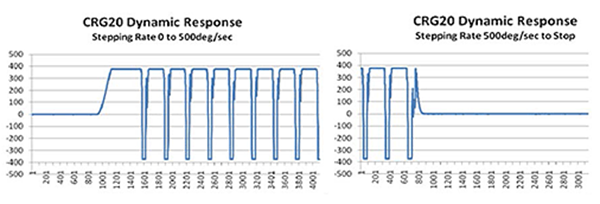
抗振动设置非常难以设计,因为它在宽频率范围内的响应并不是平坦的(低频时尤其差),而且其减振特性会随著温度和使用时间而变化。与g敏感度一样,陀螺仪的振动校正响应可能会随著频率而不同。虽然可以成功设计出抗振动设置,以衰减得知频谱下的窄频振动,但这一的类抗振设置也不适合应用于宽频振动。 机械滥用引起之主要问题 应用中会发生常规性短期滥用事件,这些滥用虽然不致于损伤陀螺仪,但会产生较大误差。下面列举几个例子。 有些陀螺仪可以承受速率超载而不会表现异常。图5显示Silicon Sensing CRG20陀螺仪对超出额定范围大约70%的速率输入的响应。左边的曲线显示的是旋转速率从0o/s变为500o/s再保持不变时CRS20的响应情况;而右边的曲线则显示输入速率从500o/s降为0o/s时该元件的响应情况。当输入速率超出额定测量范围的时候,输出在轨对轨之间紊乱地摆动。
有些陀螺仪在遭遇哪怕只有数百g的冲击的时后,也会表现出「锁定」倾向。例如,图6显示的是VTI SCR1100-D04在受到250g 0.5ms冲击时的响应情况(让5mm钢球以40cm高度落在陀螺仪旁边的PCB上)。
陀螺仪未因冲击而损坏,但它不再回应速率输入,须要关断再上电以重新启动。这并非罕见的现象,多种陀螺仪都存在类似的行为。这对即将考虑使用的陀螺仪是否能承受应用中的冲击是明智的。 显然,此类误差将大得惊人。因此,必须仔细找出特定应用中可能存在哪些滥用情况,并且验证陀螺仪是否能承受得住。 误差预算之计算 如上所述,多数陀螺仪应用中都存在运动或振动情况。利用上文所示的资料手册所列规格(如果没有规定振动校正特性,则使用保守的估计值),表2列出了表1所示陀螺仪在不同应用中的典型误差预算。从表3可以看出,增加g敏感度补偿方案后,虽然抗振性能提高了半个数量级,但振动敏感度仍然是一个远大于零、偏稳定性的误差来源。

平均值为降低误差新选择 在误差预算中,偏压稳定度是最小的元素之一,因此选择陀螺仪时,更为合理的做法是考虑将最大误差源最小化。在大多数应用中,振动敏感度是最大的误差源。然而,有时用户可能仍然希望获得比所选陀螺仪更低的杂讯或更好的偏压稳定度。幸运的是,目前有办法来解决这一问题,那就是求平均值。 不同于设计相关的环境或者是振动误差,多数陀螺仪的偏压稳定度误差具有杂讯特性。也就是说,不同元件的偏压稳定度是不相关的。因此,可通过求取多个元件的平均值来改善偏压稳定度性能。如果对n个元件求平均值,则期望的改善幅度为√n。宽频杂讯也可以透过类似的求平均值方法予以改善。 长久以来,偏压稳定度被视为陀螺仪规格的绝对标准,但在实际应用中,振动敏感度常常是限制性能的更严重因素。根据抗振能力选择陀螺仪是合理的,因为其他参数可以轻松地透过校正或对多个感测器求平均值来改善。