在越来越多的高标准工业自动化应用领域,技术的进步正在改变步进电机和伺服电机之间的性能-成本比。在采用了闭环技术后,闭环步进电机为用户提供出色的精度和效率,既能达到伺服电机的性能,又具有步进电机的低价优势。成本更低的步进电机正在逐渐渗透到原本被高成本伺服电机所支配的应用领域。
步进电机与伺服电机之对比
根据传统的观念,在需要速度超过800 RPM以及需要高动态响应的应用中,伺服控制系统性能更为出色。步进电机则更适合用于速度较低、低到中等加速度、需要较高保持转矩的应用。那么这种关于步进电机和伺服电机的传统观念的依据是什么呢?下面让我们来详细分析下。
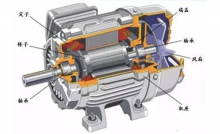
1、结 构
步进电机采用步进方式转动,利用磁线圈逐步拉动一个磁体,使其从一个位置到达下一个位置。要使电机在任何方向移动100个位置,电路都需要对电机进行100次步进操作。步进电机利用脉冲实现递增运动,可以在不使用任何反馈传感器的情况下实现精确定位。

伺服电机的运动方法是不同的。它在磁转子上连接一个位置传感器–即编码器–会持续检测电机的准确位置。伺服会监控电机实际位置和指令位置之间的差异,并对电流进行相应的调整。这种闭环系统可以使电机保持在正确的运动状态。

2、简便性和成本
步进电机不仅比伺服电机成本低,而且调试和维护都更加简单。步进电机在静止状态是稳定的,并能保持位置(即使是采用动态负载)。不过,如果某些应用场合有更高的性能要求,则必须采用更昂贵、更复杂的伺服电机。
3、定 位
在需要随时了解机器准确位置的应用中,步进电机和伺服电机有重要差别。在通过步进电机控制的开环运动应用中,控制系统认为电机始终处于正确的运动状态。不过,在遇到问题以后,比如因为部件卡住而导致电机失速,控制器就无法了解机器的实际位置,从而导致失位。伺服电机本身的闭环系统具有一个优势:如果其被一个物体卡住,会立刻检测到。机器会停止操作,始终不会失位。

4、速度和转矩
步进电机和伺服电机的性能差异源自他们不同的电机设计方案。步进电机的极数比伺服电机多得多,因此步进电机旋转一整圈,所需的绕组电流交换次数要多得多,从而导致在速度增加的情况下,其转矩迅速下降。另外,如果达到了最大转矩,步进电机可能会失去速度同步化功能。出于这些原因,在大部分高速应用中,伺服电机都是首选方案。与此相反,步进电机较多的极数在低速状态下具有优势,因为此时步进电机与同等尺寸的伺服电机相比具有转矩优势。

随着速度的增加,步进电机的转矩会下降
5、热和能耗
开环步进电机采用固定电流,并会散发大量热量。闭环控制只提供速度环路所需的电流,因此避免了电机发热问题。
比较总结
伺服控制系统最适合涉及到动态负载变化的高速应用,比如机械臂。步进控制系统则更适合需要低到中加速度和高保持转矩的应用,比如3D打印机、传送带、副轴等。因为步进电机成本更低,所以在使用之后,可以降低自动化系统的成本。运动控制系统如果需要利用伺服电机的特性,就必须证明这些成本较高的电机物有所值。
本文转自:技术 | 步进电机替代伺服电机,你信吗?