解决电动车电机驱动系统电磁干扰
selina -- 周三, 02/08/2017 - 11:42
通过消除传播途径来解决电动车电机驱动系统电磁干扰。
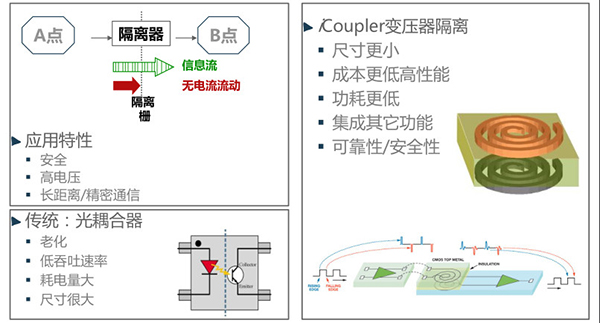
①根据地线分流原则,将强电与弱电地线分线,数字电路和模拟电路地线分线,安全地线、信号地线和噪声地线分线,最后以辐射状汇聚到一个公共接地点;采用光电隔离阻隔地环流,切断骚扰途径;外壳及散热器等与大地可靠连接,防止外界磁场的骚扰以及静电击穿;灵活运用多点和单点接地。
②从系统整体角度而言,通过屏蔽措施使驱动系统达到良好的电磁屏蔽效果也是解决系统EMC的有效手段之一。电磁屏蔽的关键是保证屏蔽体的导电连续性,使机箱形成一个连续密封的导电体,使耦合到内部电路的电磁场被反射和吸收。在机箱的永久性接缝处采用焊接工艺密封;在机箱的非永久性接缝处加入实心导电橡胶条作为导电衬垫,从而有效保证了屏蔽的完整性。
在动力线缆与信号线缆穿越机箱部分的屏蔽连续性设计也至关重要,可以采用带屏蔽的插头、插座或在端接处使用动力线缆屏蔽压接装置,实现屏蔽层与机箱的360°端接,以及采用滤波连接器设计,可以有效地抑制辐射耦合。
本文来源:解决电动车电机驱动系统电磁干扰